By adding an amplifier baseboard, external axes (traverse axis, fixture axis) can be expanded and controlled via keys on the teaching pendant. The E-axis and 8-axis operation keys of the programming teaching pendant can be assigned to any external axis (traverse axis, fixture axis). Pressing the key under the robot group selection interface will operate that axis.
External Axis
By adding an amplifier baseboard, external axes (traverse axis, fixture axis) can be expanded and controlled via keys on the teaching pendant. The E-axis and 8-axis operation keys of the programming teaching pendant can be assigned to any external axis (traverse axis, fixture axis). Pressing the key under the robot group selection interface will operate that axis.
External Axis
By adding an amplifier baseboard, external axes (traverse axis, fixture axis) can be expanded and controlled via keys on the teaching pendant. The E-axis and 8-axis operation keys of the programming teaching pendant can be assigned to any external axis (traverse axis, fixture axis). Pressing the key under the robot group selection interface will operate that axis.
Conveyor Belt Tracking
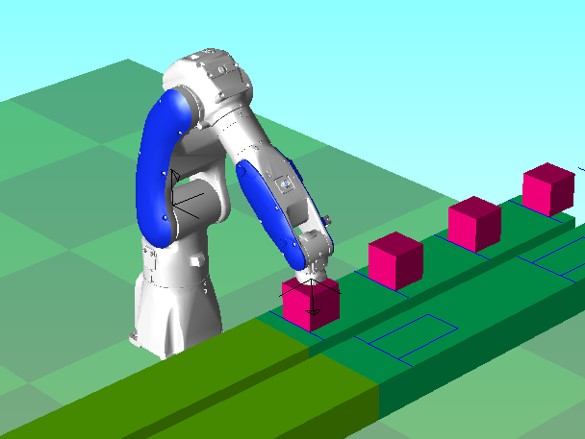
The robot will track workpieces and can perform transfer/arranging operations without stopping the conveyor.
While the conveyor belt continues to run, the robot will continuously track workpieces, achieving handling, spraying, and other tasks. Based on onsite requirements, there are two working modes:
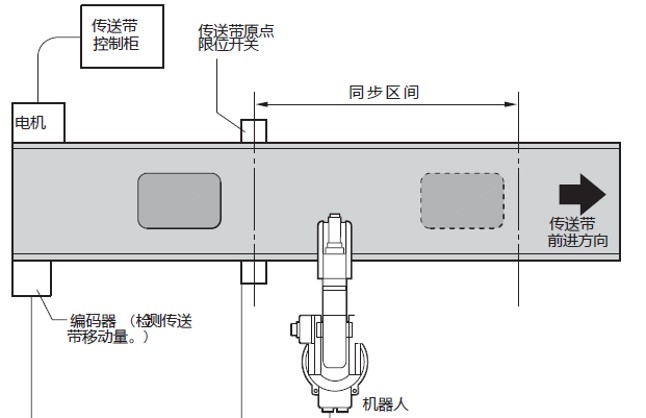
1.Sensor Tracking
Single workpieces lined up straight on the conveyor belt, passing through a fiber optic sensor, triggering the tracking signal. This enables the robot to maintain a constant relative distance to the moving workpieces, achieving tracking and handling. One trigger per workpiece, simple setup.
2.Vision Tracking
Any number of workpieces, conveyed arbitrarily on the conveyor belt. Captured image information by the vision system sends position data to the robot for tracking.
The robot will track workpieces and can perform transfer/arranging operations without stopping the conveyor.
While the conveyor belt continues to run, the robot will continuously track workpieces, achieving handling, spraying, and other tasks. Based on onsite requirements, there are two working modes:
1.Sensor Tracking
Single workpieces lined up straight on the conveyor belt, passing through a fiber optic sensor, triggering the tracking signal. This enables the robot to maintain a constant relative distance to the moving workpieces, achieving tracking and handling. One trigger per workpiece, simple setup.
2.Vision Tracking
Any number of workpieces, conveyed arbitrarily on the conveyor belt. Captured image information by the vision system sends position data to the robot for tracking.
The robot will track workpieces and can perform transfer/arranging operations without stopping the conveyor.
While the conveyor belt continues to run, the robot will continuously track workpieces, achieving handling, spraying, and other tasks. Based on onsite requirements, there are two working modes:
1.Sensor Tracking
Single workpieces lined up straight on the conveyor belt, passing through a fiber optic sensor, triggering the tracking signal. This enables the robot to maintain a constant relative distance to the moving workpieces, achieving tracking and handling. One trigger per workpiece, simple setup.
2.Vision Tracking
Any number of workpieces, conveyed arbitrarily on the conveyor belt. Captured image information by the vision system sends position data to the robot for tracking.
Based on feedback control from force sensors and a unique force control algorithm, precise operations can be performed, applicable to gear assembly, contour grinding, polishing, etc.
Force Control
Based on feedback control from force sensors and a unique force control algorithm, precise operations can be performed, applicable to gear assembly, contour grinding, polishing, etc.
Force Control
Based on feedback control from force sensors and a unique force control algorithm, precise operations can be performed, applicable to gear assembly, contour grinding, polishing, etc.
Virtual Fence
A hypothetical restricted area is set to limit the position of the robot arm and the workpiece. The defined area is monitored by software.
Function
By calculating the robot's position and speed, if exceeding the restricted area is possible, the servo power is cut off to ensure the robot stops. This method ensures that even if the robot moves due to inertia, it will not exceed the restricted area.
Advantages
Space-saving equipment, safety barriers can be controlled to the minimal necessary extent.
Virtual Fence
A hypothetical restricted area is set to limit the position of the robot arm and the workpiece. The defined area is monitored by software.
Function
By calculating the robot's position and speed, if exceeding the restricted area is possible, the servo power is cut off to ensure the robot stops. This method ensures that even if the robot moves due to inertia, it will not exceed the restricted area.
Advantages
Space-saving equipment, safety barriers can be controlled to the minimal necessary extent.
Virtual Fence
A hypothetical restricted area is set to limit the position of the robot arm and the workpiece. The defined area is monitored by software.
Function
By calculating the robot's position and speed, if exceeding the restricted area is possible, the servo power is cut off to ensure the robot stops. This method ensures that even if the robot moves due to inertia, it will not exceed the restricted area.
Advantages
Space-saving equipment, safety barriers can be controlled to the minimal necessary extent.
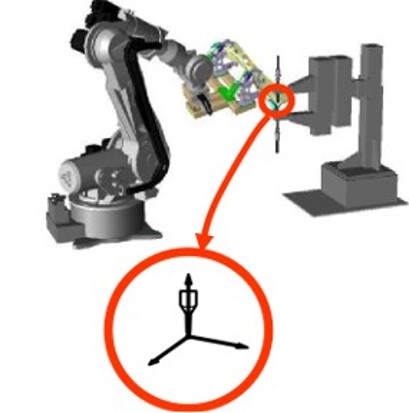
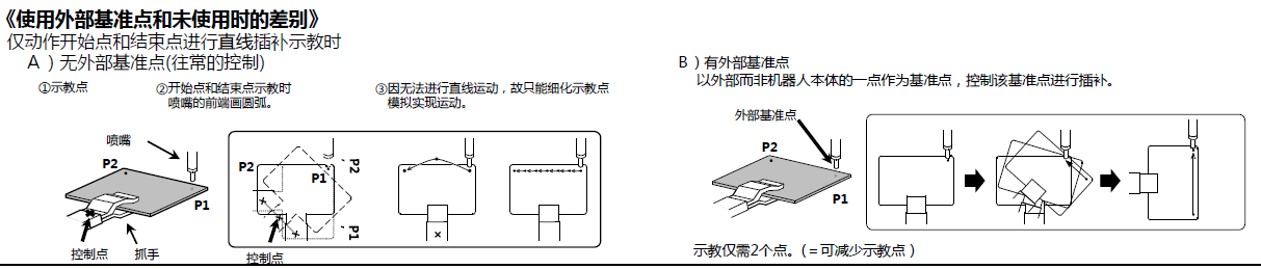
external reference point
Fixed TCP
Teaching or reproducing movements with a point in space as the control point for the main body can easily achieve actions like changing the posture of workpieces.
Function
Any point in space can be used as a control point, allowing for linear and arc interpolation based on that reference point, maintaining stable shapes.
Advantages
Reduces the number of teaching points, thus improving teaching time. Up to 63 reference points can be used, making tool switching easy.
Teaching or reproducing movements with a point in space as the control point for the main body can easily achieve actions like changing the posture of workpieces.
Function
Any point in space can be used as a control point, allowing for linear and arc interpolation based on that reference point, maintaining stable shapes.
Advantages
Reduces the number of teaching points, thus improving teaching time. Up to 63 reference points can be used, making tool switching easy.
Teaching or reproducing movements with a point in space as the control point for the main body can easily achieve actions like changing the posture of workpieces.
Function
Any point in space can be used as a control point, allowing for linear and arc interpolation based on that reference point, maintaining stable shapes.
Advantages
Reduces the number of teaching points, thus improving teaching time. Up to 63 reference points can be used, making tool switching easy.
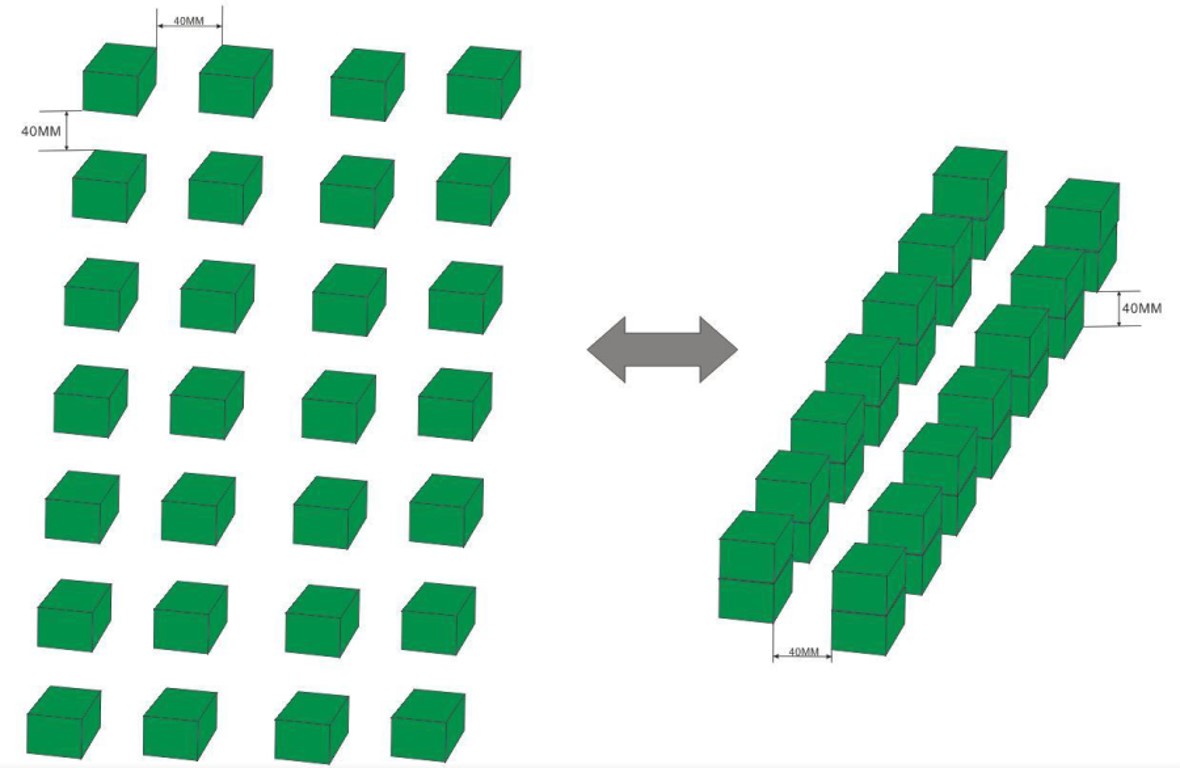
Function
Using template programs, just set the initial pick and place positions, product dimensions, number and spacing, to complete the programming of the palletizing process.
Advantages
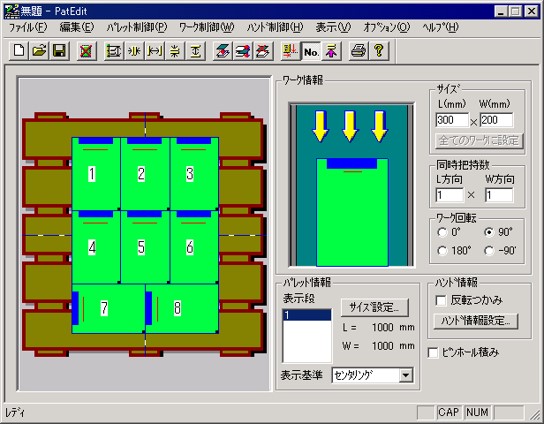
Operated on the teaching programmer, supporting software for palletizing tasks. Helps shorten setup time, improving operation efficiency.
.Automatically generates palletizing programs.
.Easily check the status of palletizing.
.Easily select and change operation contents.
Palletizing Specific Software MOTOPAL
Palletizing
Function
Using template programs, just set the initial pick and place positions, product dimensions, number and spacing, to complete the programming of the palletizing process.
Advantages
Operated on the teaching programmer, supporting software for palletizing tasks. Helps shorten setup time, improving operation efficiency.
.Automatically generates palletizing programs.
.Easily check the status of palletizing.
.Easily select and change operation contents.
Palletizing Specific Software MOTOPAL
Palletizing
Function
Using template programs, just set the initial pick and place positions, product dimensions, number and spacing, to complete the programming of the palletizing process.
Advantages
Operated on the teaching programmer, supporting software for palletizing tasks. Helps shorten setup time, improving operation efficiency.
.Automatically generates palletizing programs.
.Easily check the status of palletizing.
.Easily select and change operation contents.
Palletizing Specific Software MOTOPAL
Soft Floating
Servo floating function not only controls the robot's position but also controls the robot's position and force based on the external load, flexibly controlling the robot's position and posture.
Function
Servo floating function, consisting of joint servo floating and linear servo floating functions.
① Joint Servo Floating Function
Applicable when external force is applied to a specific axis of the robot or when the direction of the external force is unknown and it is desired to apply servo floating to all axes of the robot.
② Linear Servo Floating Function
Uses the robot coordinates, base coordinates, user coordinates, tool coordinates, etc., for servo floating along each coordinate system's axes. Suitable when external force is applied in any direction within these coordinate systems.
Advantages
① The robot can operate according to the external force.
For example, during the workpiece removal operation from a die-casting machine, the workpiece is ejected by the machine's ejector rod. If a robot not using the servo floating function holds the workpiece, it will struggle to maintain the teaching point position against the ejecting force, making it difficult to operate smoothly. If using the servo floating function, the robot can flexibly act according to the external force, allowing smooth removal of the workpiece.
② No need for additional hardware.
No sensors needed for detecting external forces. Allows low-cost implementation of operations applying external force to the robot.
Servo floating function not only controls the robot's position but also controls the robot's position and force based on the external load, flexibly controlling the robot's position and posture.
Function
Servo floating function, consisting of joint servo floating and linear servo floating functions.
① Joint Servo Floating Function
Applicable when external force is applied to a specific axis of the robot or when the direction of the external force is unknown and it is desired to apply servo floating to all axes of the robot.
② Linear Servo Floating Function
Uses the robot coordinates, base coordinates, user coordinates, tool coordinates, etc., for servo floating along each coordinate system's axes. Suitable when external force is applied in any direction within these coordinate systems.
Advantages
① The robot can operate according to the external force.
For example, during the workpiece removal operation from a die-casting machine, the workpiece is ejected by the machine's ejector rod. If a robot not using the servo floating function holds the workpiece, it will struggle to maintain the teaching point position against the ejecting force, making it difficult to operate smoothly. If using the servo floating function, the robot can flexibly act according to the external force, allowing smooth removal of the workpiece.
② No need for additional hardware.
No sensors needed for detecting external forces. Allows low-cost implementation of operations applying external force to the robot.
Servo floating function not only controls the robot's position but also controls the robot's position and force based on the external load, flexibly controlling the robot's position and posture.
Function
Servo floating function, consisting of joint servo floating and linear servo floating functions.
① Joint Servo Floating Function
Applicable when external force is applied to a specific axis of the robot or when the direction of the external force is unknown and it is desired to apply servo floating to all axes of the robot.
② Linear Servo Floating Function
Uses the robot coordinates, base coordinates, user coordinates, tool coordinates, etc., for servo floating along each coordinate system's axes. Suitable when external force is applied in any direction within these coordinate systems.
Advantages
① The robot can operate according to the external force.
For example, during the workpiece removal operation from a die-casting machine, the workpiece is ejected by the machine's ejector rod. If a robot not using the servo floating function holds the workpiece, it will struggle to maintain the teaching point position against the ejecting force, making it difficult to operate smoothly. If using the servo floating function, the robot can flexibly act according to the external force, allowing smooth removal of the workpiece.
② No need for additional hardware.
No sensors needed for detecting external forces. Allows low-cost implementation of operations applying external force to the robot.
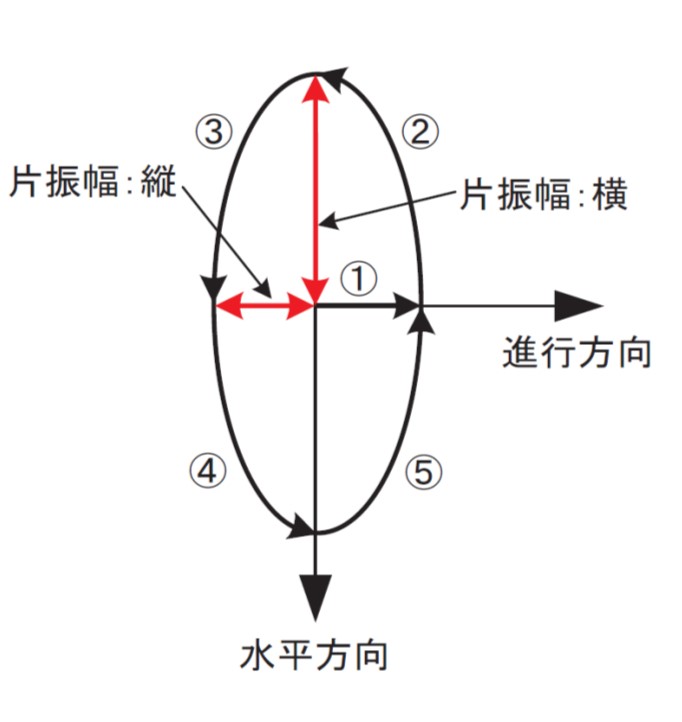
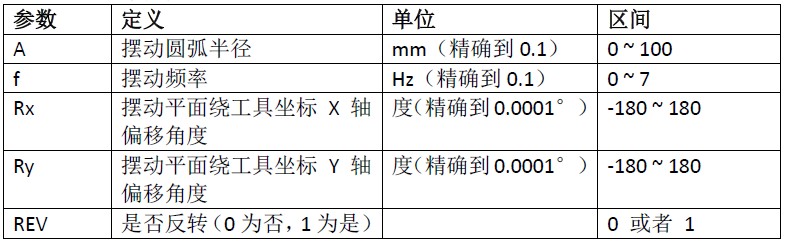
Through the arc swinging macro command, arc swinging actions during grinding can be achieved.
Function
By setting parameters in a single command within the program, the grinding trajectory can be set. Adding a pneumatic grinding head enables grinding functions.
Advantages
Simple debugging, no complex settings required. A single instruction completes the setup.
Through the arc swinging macro command, arc swinging actions during grinding can be achieved.
Function
By setting parameters in a single command within the program, the grinding trajectory can be set. Adding a pneumatic grinding head enables grinding functions.
Advantages
Simple debugging, no complex settings required. A single instruction completes the setup.
Through the arc swinging macro command, arc swinging actions during grinding can be achieved.
Function
By setting parameters in a single command within the program, the grinding trajectory can be set. Adding a pneumatic grinding head enables grinding functions.
Advantages
Simple debugging, no complex settings required. A single instruction completes the setup.