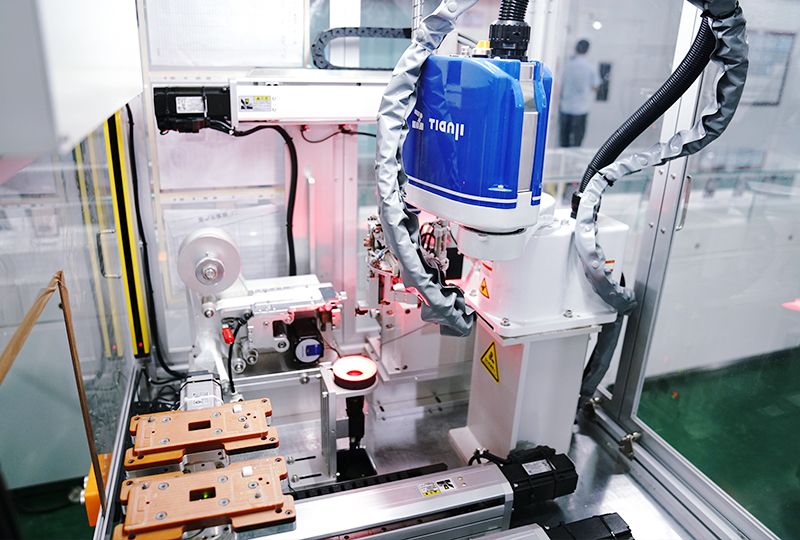
The system utilizes upper dual cameras to identify the position and angle of copper foil. Tianji SCARA communicates with these cameras to pinpoint locations, directing five suction nozzles to accurately pick up the copper foil. A lower camera captures further images to calculate compensation values, ensuring precise placement.
Robot Model: SR3D/SR3
Key Features:Integrates communication between the robot and three cameras, featuring automatic calibration and compensation calculations by the lower camera for error correction. Precision requirement: 0.03mm.