近年来,在工业、服务业等各领域,人类正在迎来与机器人协同发展的新阶段,产品个性化需求的增多和产品更新换代的加速,机器人细分领域的市场集中度在持续提升,产品应用的场景也在不断拓宽。

为解决行业痛点,天机结合自身资源情况与技术优势,共推出了全新EVO4、EVO7、EVO7L、EVO12,4种型号,工作半径达565mm,723mm、912mm及1470mm,最大负载分别为4kg,7kg及12kg。扩充了天机机器人产品线,填补了紧凑型和中小型负载之间的空白,从不同维度满足客户个性化应用需求。

EVO系列名称源于Evolution,沿袭天机机器人一如既往的高防护等级、高性价比以及更加紧凑的结构,中空的手腕设计让运行更加流畅、扩展性强,可灵活配置。针对推出的4款不同负载、臂展的机器人都有其适应应用领域。

1// EVO4
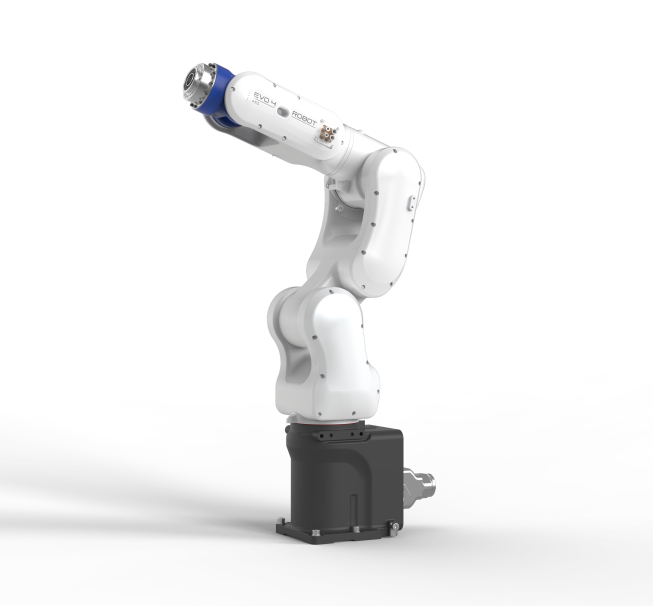
- 负载:4kg
- 臂展:565mm
- 重复定位精度:±0.02mm
- 防护等级:IP67
EVO4结构紧凑,占地面积不超过0.15㎡,±0.02mm的重复定位精度保证作业稳定,全机身IP67防护等级,可从事精确度要求较高的精密装配、检测、涂胶等工序;
2// EVO7/7L
- 负载:7kg
- 臂展:723/912mm
- 重复定位精度:±0.02mm
- 防护等级:IP67
EVO7/7L扩展性强,可选普通臂展和加长臂展,0.33S标准循环时间,高节拍工作大幅度高生产效率, 适用于3C、汽车、新能源等行业的搬运、打磨、装配等;
3// EVO12

- 负载:12kg
- 臂展:1470mm
- 重复定位精度:±0.04mm
- 防护等级:IP67
EVO12具有很强的易用性以及可靠性,提供高性价比的应用解决方案,可应用于搬运、机床上下料、涂胶、去毛刺、打磨抛光等领域。
Applications
在应用上,EVO系列搭载天机自主研发的控制系统Nebula,更加开放共享的界面,全前瞻类运动规划能力、力控功能、路径动态信息实时交互能力以及快速运动接口,机器人可通过视觉AI等快速对环境进行响应,提升柔性部署能力。
EVO4胶道检测
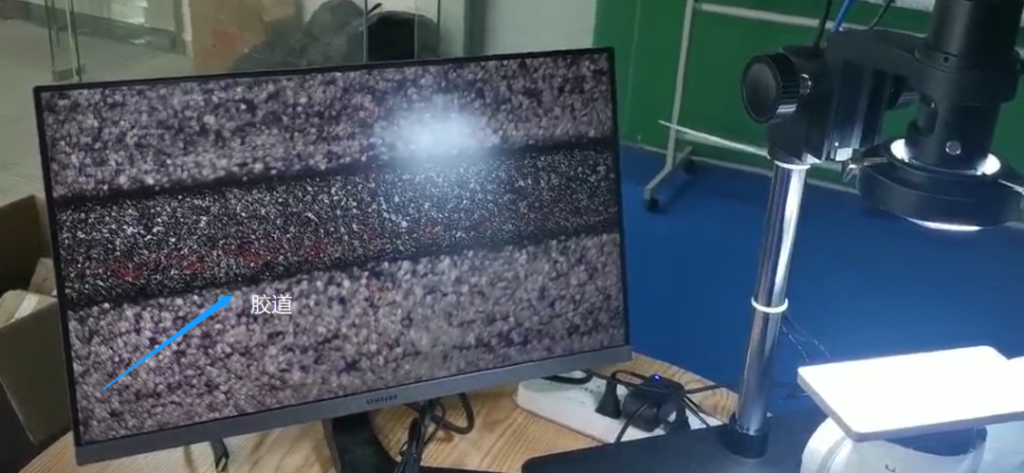
EVO4搭载2D相机识别工件,反馈给控制系统生成路径,根据生成的路径设置合适的坐标系,检测胶水在胶道中的状态,运行过程中让胶道会一直呈现在相机镜头中心。此项目难点为检测精度和机器人的运行精度要高度匹配胶道,对机器人以及控制系统的路径规划能力、运动精度提出很大挑战。
EVO4机器人有着同等系列最小的安装底座和多方位的安装孔,以及可以任意角度的安装。紧凑灵巧的机身加上可调整的安装方式实现在小型机台内大展身手,大幅提高面积利用率以及生产效率。
EVO12鞋帮打磨
一台EVO12机器人+智能3D视觉组成的鞋帮打磨设备,可实现不同型号不同大小的鞋帮自动轮廓识别及轨迹生成到最后的机器人打磨,整个打磨过程只需要一人上下料,设备投资回报率不超过一年。
以往的机器人做轨迹跟随打磨应用时,轨迹精度很难满足要求, EVO12配合天机控制系统Nebula,整个打磨轨迹精度在±0.3mm,运动控制采用了CNC一样的算法,控制柜可以预读几千到上万行点位,从而完成高轨迹的规划,满足鞋帮特殊形状打磨应用需求。
EVO12工件切屑
EVO12搭载自主研发的控制系统Nebula,代替机床对S型工件进行切屑,拥有类似机床控制器的规划能力,可以按照工艺要求进行连续规划作业且作业范围更广。

相比机床的五轴控制系统,EVO12可代替机床从事部分雕刻、切割、打磨等工作,操作更加便捷,培训成本更低,在保证规划速度、精度的同时性能也趋于稳定。天机控制器规划出的关节运动数据保证位置精准、加速度连续、加速度有界,使得机器人在对S型工件进行切屑过程中走位精准,运动平稳顺滑,大大提高生产效率,高投资回报率,助力企业柔性生产线。